Hello,
I would like to continue on this discussion, to better explain the underlying story.
This is the procedure we use to prepare a pixy2 camera:
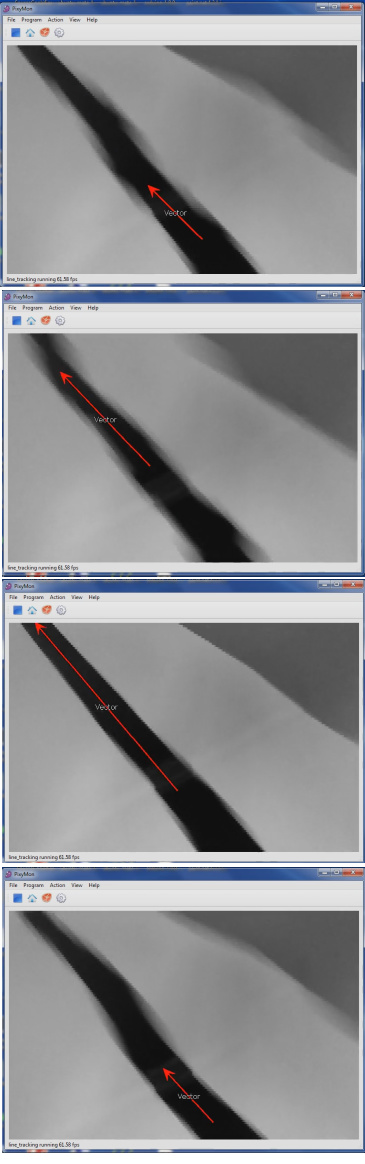
- connect in pixyMon. display live stream
- File > Restaure defaults parameters => pixy reboots (black screen, then video stream is back after a few secs) => params have been reset
- File > Load Pixy Parameters > select “parametres_pixy_prod.prm”
here a link towards the configuration file => https://gist.githubusercontent.com/alexisdal/c2711395d75f4dbf97ef8de09efac57d/raw/5756b749fa45b83a59b124d84711e3d9cc6917c2/parametres_pixy_prod.prm
We used the “save settings” feature precisely to have a very simple pixy2 preparation procedure. So the settings are the same among cameras.
We track the number of times the pixy has “lost the line”. We recently observed that one AGV in particular (more recently built than another one) would have much poorer line_loss statistics and we do not understand why. We first suspected motoring issues (because wheels would produce a funny sound in curves), we swapped them => to no avail. same issues.
Then we tried to swap the pixy2 for an older one we bought about 1year ago (fw 3.0.11 instead of 3.0.13 with a pixy2 we bought a few months ago) => the “funny sound in curves” issue is not entirely gone but the line_loss statistics is MUCH better.
In order to better understand the situation, i tried to make a simple diagnostics procedure
- put the AGV on bricks (a few centimers above the ground so that the wheels do not touch the floor)
- output the value of
linePosition = (int16_t)pixy.line.vectors->m_x1 - (int16_t)X_CENTER(at 62fps more or less, with#define X_CENTER (pixy.frameWidth/2) - slowly manually move the paper line below the camera from left to right back and forth
- graph data

=> this with the older AGV that works just fine. the line is smooth, the motoring sound too. all ok

=> this is the problematic AGV (before swapping the pixy2). there are moments when the line_vector seems to flicker a lot (but while i have the very same paper line in my hands and same lighting conditions => i know it’s not moving crazy this from one frame to the next like the data says). I believe this explains the motor sound issues (rapid changes of velocity targets)
Knowing that both cameras have same configuration (see link above) but different fw version => what can possibly cause this behavior?